Sensor model¶
The class otb::SensorTransformBase is the base class for sensor
models. It inherits from otb::Transform, which inherits from
itk::Transform. It is templated over the data type, and input and
output dimensions. All sensor model classes should inherit from it,
and implement the methods:
SetMetadataModelthat takes aboost::anyobject representing the model;IsValidSensorModelthat returns true if the model is correctly set;TransformPointthat process the transformation.
RPC sensor model¶
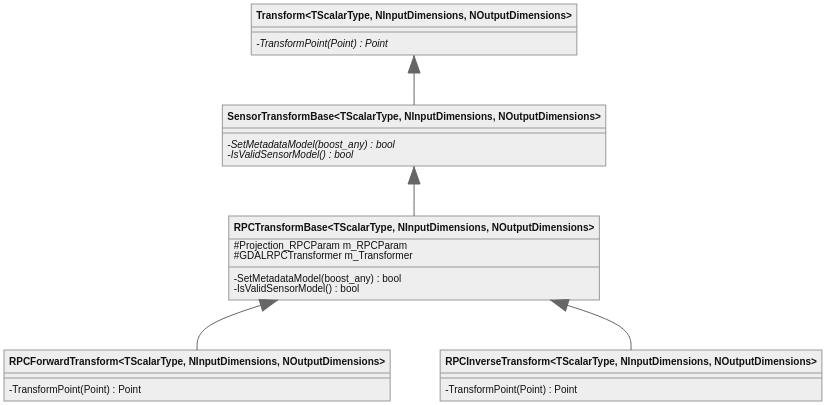
The structure otb::Projection::RPCParam is used to store the
parameters of the RPC model. It is based on GDAL’s RPC structure.
The RPC model is stored in the otb::ImageMetadata object, using
the key MDGeom::RPC. The classes otb::RPCTransformBase,
otb::RPCForwardTransform and otb::RPCInverseTransform are used
to perform forward and inverse transformation using this model.
The abstract class otb::RPCTransformBase contains the
implementation of the SetMetadataModel method, which receives the RPC
description from the otb::ImageMetadata and instantiates an
otb::GDALRPCTransformer.
The classes otb::RPCForwardTransform and
otb::RPCInverseTransform each implement a version of the
TransformPoint method which uses the otb::GDALRPCTransformer.
SAR sensor model¶
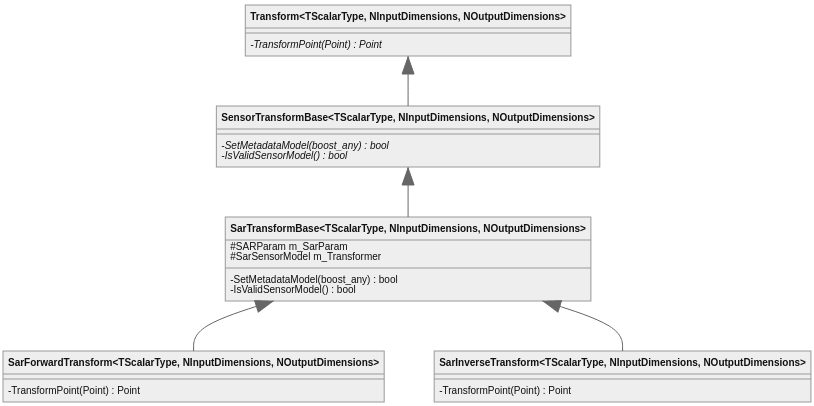
The structure otb::SARParam is used to store the parameters of the
SAR model. For an exhaustive list of the parameters available in the
otb::SARParam, see the Doxygen.
The SAR model is stored in the otb::ImageMetadata object, using
the key MDGeom::SAR. The classes otb::SarTransformBase,
otb::SarForwardTransform and otb::SarInverseTransform are used
to perform forward and inverse transformation using this model.
The abstract class otb::SarTransformBase contains the
implementation of the SetMetadataModel method, which receives the
otb::SARParam description from the otb::ImageMetadata and
instantiates an otb::SarSensorModel.
The classes otb::SarForwardTransform and
otb::SarInverseTransform each implement a version of the
TransformPoint method which uses the otb::SarSensorModel.
Sensor Transform Factory¶
The class SensorTransformFactory is designed to automatically
instantiate the best sensor transform based on the available
metadata. One should use the function CreateTransform which is
templated over the scalar type used in the transform and the
dimensions of the input and output spaces. It takes as parameters a
pointer to the ImageMetadata object, and the direction of the
transform (either FORWARD or INVERSE). It returns a std::unique_ptr to
the transform object.
#include "otbSensorTransformFactory.h"
auto sensorModel = otb::SensorTransformFactory::GetInstance().CreateTransform <double, 2, 3>(imageMetadataPointer, TransformDirection::FORWARD);
auto worldPoint = sensorModel->TransformPoint(sensorPoint);