Filters¶
This purpose of this chapter is help developers create their own filter (process object). This chapter is divided into four major parts. An initial definition of terms is followed by an overview of the filter creation process. Next, data streaming is discussed. The way data is streamed in ITK must be understood in order to write correct filters. Finally, a section on multithreading describes what you must do in order to take advantage of shared memory parallel processing.
Terminology¶
The following is some basic terminology for the discussion that follows. Chapter System Overview provides additional background information.
- The data processing pipeline is a directed graph of process and data objects. The pipeline inputs, operators on, and outputs data.
- A filter, or process object, has one or more inputs, and one or more outputs.
- A source, or source process object, initiates the data processing pipeline, and has one or more outputs.
- A mapper, or mapper process object, terminates the data processing pipeline. The mapper has one or more outputs, and may write data to disk, interface with a display system, or interface to any other system.
- A data object represents and provides access to data. In ITK, the data object (ITK class itk::DataObject) is typically of type otb::Image or itk::Mesh.
- A region (ITK class itk::Region) represents a piece, or subset of the entire data set.
- An image region (ITK class itk::ImageRegion) represents a structured portion of data. ImageRegion is implemented using the itk::Index and itk::Size classes
- A mesh region (ITK class itk::MeshRegion) represents an unstructured portion of data.
- The LargestPossibleRegion is the theoretical single, largest piece (region) that could represent the entire dataset. The LargestPossibleRegion is used in the system as the measure of the largest possible data size.
- The BufferedRegion is a contiguous block of memory that is less than or equal to in size to the LargestPossibleRegion. The buffered region is what has actually been allocated by a filter to hold its output.
- The RequestedRegion is the piece of the dataset that a filter is required to produce. The RequestedRegion is less than or equal in size to the BufferedRegion. The RequestedRegion may differ in size from the BufferedRegion due to performance reasons. The RequestedRegion may be set by a user, or by an application that needs just a portion of the data.
- The modified time (represented by ITK class itk::TimeStamp) is a monotonically increasing integer value that characterizes a point in time when an object was last modified.
- Downstream is the direction of dataflow, from sources to mappers.
- Upstream is the opposite of downstream, from mappers to sources.
- The pipeline modified time for a particular data object is the maximum modified time of all upstream data objects and process objects.
- The term information refers to metadata that characterizes data. For example, index and dimensions are information characterizing an image region.
Overview of Filter Creation¶
Filters are defined with respect to the type of data they input (if any), and the type of data they output (if any). The key to writing a ITK filter is to identify the number and types of input and output. Having done so, there are often superclasses that simplify this task via class derivation. For example, most filters in ITK take a single image as input, and produce a single image on output. The superclass itk::ImageToImageFilter is a convenience class that provide most of the functionality needed for such a filter.
Some common base classes for new filters include:
ImageToImageFilter: the most common filter base for segmentation algorithms. Takes an image and produces a new image, by default of the same dimensions. OverrideGenerateOutputInformationto produce a different size.UnaryFunctorImageFilter: used when defining a filter that applies a function to an image.BinaryFunctorImageFilter: used when defining a filter that applies an operation to two images.ImageFunction: a functor that can be applied to an image, evaluating at each point in the image.
at each point in the image.MeshToMeshFilter: a filter that transforms meshes, such as tessellation, polygon reduction, and so on.LightObject: abstract base for filters that don’t fit well anywhere else in the class hierarchy. Also useful for “calculator” filters; ie. a sink filter that takes an input and calculates a result which is retrieved using aGet()method.
Once the appropriate superclass is identified, the filter writer
implements the class defining the methods required by most all ITK
objects: New(), PrintSelf(), and protected constructor, copy
constructor, delete, and operator=, and so on. Also, don’t forget
standard typedefs like Self, Superclass, Pointer, and
ConstPointer. Then the filter writer can focus on the most important
parts of the implementation: defining the API, data members, and other
implementation details of the algorithm. In particular, the filter
writer will have to implement either a GenerateData() (non-threaded)
or ThreadedGenerateData() method. (See Section [sec:MultiThreading]
for an overview of multi-threading in ITK.)
An important note: the GenerateData() method is required to allocate
memory for the output. The ThreadedGenerateData() method is not. In
default implementation (see itk::ImageSource, a superclass of
itk::ImageToImageFilter) GenerateData() allocates memory
and then invokes ThreadedGenerateData().
One of the most important decisions that the developer must make is whether the filter can stream data; that is, process just a portion of the input to produce a portion of the output. Often superclass behavior works well: if the filter processes the input using single pixel access, then the default behavior is adequate. If not, then the user may have to a) find a more specialized superclass to derive from, or b) override one or more methods that control how the filter operates during pipeline execution. The next section describes these methods.
Streaming Large Data¶
The data associated with multi-dimensional images is large and becoming larger. This trend is due to advances in scanning resolution, as well as increases in computing capability. Any practical segmentation and registration software system must address this fact in order to be useful in application. ITK addresses this problem via its data streaming facility.
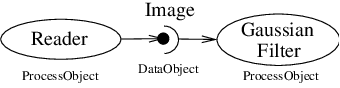
In ITK, streaming is the process of dividing data into pieces, or regions, and then processing this data through the data pipeline. Recall that the pipeline consists of process objects that generate data objects, connected into a pipeline topology. The input to a process object is a data object (unless the process initiates the pipeline and then it is a source process object). These data objects in turn are consumed by other process objects, and so on, until a directed graph of data flow is constructed. Eventually the pipeline is terminated by one or more mappers, that may write data to storage, or interface with a graphics or other system. This is illustrated in figures [fig:DataPipeLineOneConnection] and [fig:DataPipeLine].
A significant benefit of this architecture is that the relatively complex process of managing pipeline execution is designed into the system. This means that keeping the pipeline up to date, executing only those portions of the pipeline that have changed, multithreading execution, managing memory allocation, and streaming is all built into the architecture. However, these features do introduce complexity into the system, the bulk of which is seen by class developers. The purpose of this chapter is to describe the pipeline execution process in detail, with a focus on data streaming.
Overview of Pipeline Execution¶
The pipeline execution process performs several important functions.
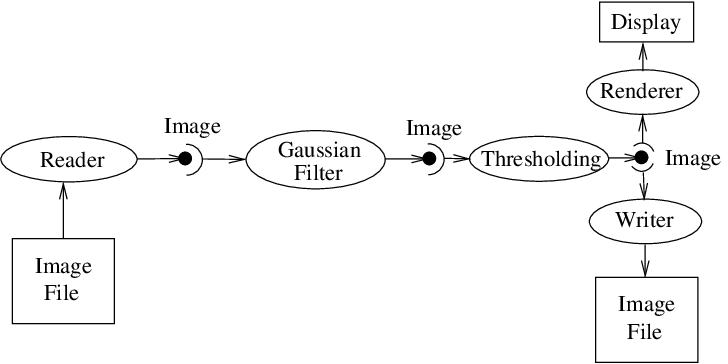
Fig. 32 The Data Pipeline
- It determines which filters, in a pipeline of filters, need to execute. This prevents redundant execution and minimizes overall execution time.
- It initializes the (filter’s) output data objects, preparing them for new data. In addition, it determines how much memory each filter must allocate for its output, and allocates it.
- The execution process determines how much data a filter must process in order to produce an output of sufficient size for downstream filters; it also takes into account any limits on memory or special filter requirements. Other factors include the size of data processing kernels, that affect how much data input data (extra padding) is required.
- It subdivides data into subpieces for multithreading. (Note that the division of data into subpieces is exactly same problem as dividing data into pieces for streaming; hence multithreading comes for free as part of the streaming architecture.)
- It may free (or release) output data if filters no longer need it to
compute, and the user requests that data is to be released. (Note: a
filter’s output data object may be considered a “cache”. If the cache
is allowed to remain (
ReleaseDataFlagOff()) between pipeline execution, and the filter, or the input to the filter, never changes, then process objects downstream of the filter just reuse the filter’s cache to re-execute.)
To perform these functions, the execution process negotiates with the filters that define the pipeline. Only each filter can know how much data is required on input to produce a particular output. For example, a shrink filter with a shrink factor of two requires an image twice as large (in terms of its x-y dimensions) on input to produce a particular size output. An image convolution filter would require extra input (boundary padding) depending on the size of the convolution kernel. Some filters require the entire input to produce an output (for example, a histogram), and have the option of requesting the entire input. (In this case streaming does not work unless the developer creates a filter that can request multiple pieces, caching state between each piece to assemble the final output.)
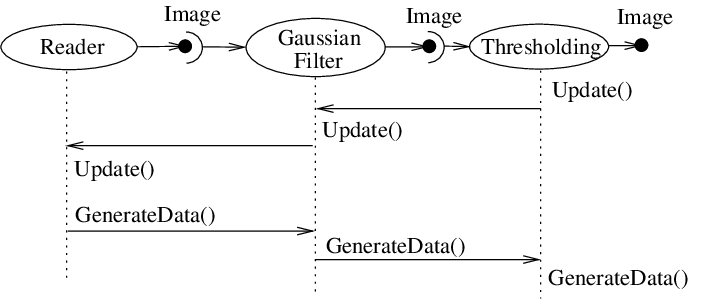
Fig. 33 Sequence of the Data Pipeline updating mechanism
Ultimately the negotiation process is controlled by the request for data of a particular size (i.e., region). It may be that the user asks to process a region of interest within a large image, or that memory limitations result in processing the data in several pieces. For example, an application may compute the memory required by a pipeline, and then use itk::StreamingImageFilter to break the data processing into several pieces. The data request is propagated through the pipeline in the upstream direction, and the negotiation process configures each filter to produce output data of a particular size.
The secret to creating a streaming filter is to understand how this negotiation process works, and how to override its default behavior by using the appropriate virtual functions defined in itk::ProcessObject. The next section describes the specifics of these methods, and when to override them. Examples are provided along the way to illustrate concepts.
Details of Pipeline Execution¶
Typically pipeline execution is initiated when a process object receives
the ProcessObject::Update() method invocation. This method is simply
delegated to the output of the filter, invoking the
DataObject::Update() method. Note that this behavior is typical of
the interaction between ProcessObject and DataObject: a method invoked
on one is eventually delegated to the other. In this way the data
request from the pipeline is propagated upstream, initiating data flow
that returns downstream.
The DataObject::Update() method in turn invokes three other methods:
DataObject::UpdateOutputInformation()DataObject::PropagateRequestedRegion()DataObject::UpdateOutputData()
UpdateOutputInformation()¶
The UpdateOutputInformation() method determines the pipeline
modified time. It may set the RequestedRegion and the
LargestPossibleRegion depending on how the filters are configured. (The
RequestedRegion is set to process all the data, i.e., the
LargestPossibleRegion, if it has not been set.) The
UpdateOutputInformation() propagates upstream through the entire
pipeline and terminates at the sources.
During UpdateOutputInformation(), filters have a chance to override
the ProcessObject::GenerateOutputInformation() method
(GenerateOutputInformation() is invoked by
UpdateOutputInformation()). The default behavior is for the
GenerateOutputInformation() to copy the metadata describing the
input to the output (via DataObject::CopyInformation()). Remember,
information is metadata describing the output, such as the origin,
spacing, and LargestPossibleRegion (i.e., largest possible size) of an
image.
A good example of this behavior is itk::ShrinkImageFilter.
This filter takes an input image and shrinks it by some integral value.
The result is that the spacing and LargestPossibleRegion of the output
will be different to that of the input. Thus,
GenerateOutputInformation() is overloaded.
PropagateRequestedRegion()¶
The PropagateRequestedRegion() call propagates upstream to satisfy a
data request. In typical application this data request is usually the
LargestPossibleRegion, but if streaming is necessary, or the user is
interested in updating just a portion of the data, the RequestedRegion
may be any valid region within the LargestPossibleRegion.
The function of PropagateRequestedRegion() is, given a request for
data (the amount is specified by RequestedRegion), propagate upstream
configuring the filter’s input and output process object’s to the
correct size. Eventually, this means configuring the BufferedRegion,
that is the amount of data actually allocated.
The reason for the buffered region is this: the output of a filter may be consumed by more than one downstream filter. If these consumers each request different amounts of input (say due to kernel requirements or other padding needs), then the upstream, generating filter produces the data to satisfy both consumers, that may mean it produces more data than one of the consumers needs.
The ProcessObject::PropagateRequestedRegion() method invokes three
methods that the filter developer may choose to overload.
EnlargeOutputRequestedRegion(DataObject *output)gives the (filter) subclass a chance to indicate that it will provide more data than required for the output. This can happen, for example, when a source can only produce the whole output (i.e., the LargestPossibleRegion).GenerateOutputRequestedRegion(DataObject *output)gives the subclass a chance to define how to set the requested regions for each of its outputs, given this output’s requested region. The default implementation is to make all the output requested regions the same. A subclass may need to override this method if each output is a different resolution. This method is only overridden if a filter has multiple outputs.GenerateInputRequestedRegion()gives the subclass a chance to request a larger requested region on the inputs. This is necessary when, for example, a filter requires more data at the “internal” boundaries to produce the boundary values - due to kernel operations or other region boundary effects.
itk::RGBGibbsPriorFilter is an example of a filter that needs
to invoke EnlargeOutputRequestedRegion(). The designer of this
filter decided that the filter should operate on all the data. Note that
a subtle interplay between this method and
GenerateInputRequestedRegion() is occurring here. The default
behavior of GenerateInputRequestedRegion() (at least for
itk::ImageToImageFilter) is to set the input RequestedRegion
to the output’s RequestedRegion. Hence, by overriding the method
EnlargeOutputRequestedRegion() to set the output to the
LargestPossibleRegion, effectively sets the input to this filter to the
LargestPossibleRegion (and probably causing all upstream filters to
process their LargestPossibleRegion as well. This means that the filter,
and therefore the pipeline, does not stream. This could be fixed by
reimplementing the filter with the notion of streaming built in to the
algorithm.)
itk::GradientMagnitudeImageFilter is an example of a filter
that needs to invoke GenerateInputRequestedRegion(). It needs a
larger input requested region because a kernel is required to compute
the gradient at a pixel. Hence the input needs to be “padded out” so the
filter has enough data to compute the gradient at each output pixel.
UpdateOutputData()¶
UpdateOutputData() is the third and final method as a result of the
Update() method. The purpose of this method is to determine whether
a particular filter needs to execute in order to bring its output up to
date. (A filter executes when its GenerateData() method is invoked.)
Filter execution occurs when a) the filter is modified as a result of
modifying an instance variable; b) the input to the filter changes; c)
the input data has been released; or d) an invalid RequestedRegion was
set previously and the filter did not produce data. Filters execute in
order in the downstream direction. Once a filter executes, all filters
downstream of it must also execute.
DataObject::UpdateOutputData() is delegated to the DataObject’s
source (i.e., the ProcessObject that generated it) only if the
DataObject needs to be updated. A comparison of modified time, pipeline
time, release data flag, and valid requested region is made. If any one
of these conditions indicate that the data needs regeneration, then the
source’s ProcessObject::UpdateOutputData() is invoked. These calls
are made recursively up the pipeline until a source filter object is
encountered, or the pipeline is determined to be up to date and valid.
At this point, the recursion unrolls, and the execution of the filter
proceeds. (This means that the output data is initialized, StartEvent is
invoked, the filters GenerateData() is called, EndEvent is invoked,
and input data to this filter may be released, if requested. In
addition, this filter’s InformationTime is updated to the current time.)
The developer will never override UpdateOutputData(). The developer
need only write the GenerateData() method (non-threaded) or
ThreadedGenerateData() method. A discussion of threading follows in
the next section.
Threaded Filter Execution¶
Filters that can process data in pieces can typically multi-process
using the data parallel, shared memory implementation built into the
pipeline execution process. To create a multithreaded filter, simply
define and implement a ThreadedGenerateData() method. For example, a
itk::ImageToImageFilter would create the method:
void ThreadedGenerateData(const OutputImageRegionType& outputRegionForThread, itk::ThreadIdType threadId)
The key to threading is to generate output for the output region given (as the first parameter in the argument list above). In ITK, this is simple to do because an output iterator can be created using the region provided. Hence the output can be iterated over, accessing the corresponding input pixels as necessary to compute the value of the output pixel.
Multi-threading requires caution when performing I/O (including using
cout or cerr) or invoking events. A safe practice is to allow
only thread id zero to perform I/O or generate events. (The thread id is
passed as argument into ThreadedGenerateData()). If more than one
thread tries to write to the same place at the same time, the program
can behave badly, and possibly even deadlock or crash.
Filter Conventions¶
In order to fully participate in the ITK pipeline, filters are expected to follow certain conventions, and provide certain interfaces. This section describes the minimum requirements for a filter to integrate into the ITK framework.
The class declaration for a filter should include the macro
ITK_EXPORT, so that on certain platforms an export declaration can
be included.
A filter should define public types for the class itself (Self) and
its Superclass, and const and non-const smart pointers,
thus:
typedef ExampleImageFilter Self;
typedef ImageToImageFilter<TImage,TImage> Superclass;
typedef SmartPointer<Self> Pointer;
typedef SmartPointer<const Self> ConstPointer;
The Pointer type is particularly useful, as it is a smart pointer
that will be used by all client code to hold a reference-counted
instantiation of the filter.
Once the above types have been defined, you can use the following
convenience macros, which permit your filter to participate in the
object factory mechanism, and to be created using the canonical
::New():
/** Method for creation through the object factory. */
itkNewMacro(Self);
/** Run-time type information (and related methods). */
itkTypeMacro(ExampleImageFilter, ImageToImageFilter);
The default constructor should be protected, and provide sensible
defaults (usually zero) for all parameters. The copy constructor and
assignment operator should be declared private and not implemented,
to prevent instantiating the filter without the factory methods (above).
Finally, the template implementation code (in the .hxx file) should
be included, bracketed by a test for manual instantiation, thus:
#ifndef ITK_MANUAL_INSTANTIATION
#include "itkExampleFilter.hxx"
#endif
Optional¶
A filter can be printed to an std::ostream (such as std::cout)
by implementing the following method:
void PrintSelf(std::ostream& os, Indent indent) const;
and writing the name-value pairs of the filter parameters to the supplied output stream. This is particularly useful for debugging.
Useful Macros¶
Many convenience macros are provided by ITK, to simplify filter coding. Some of these are described below:
- itkStaticConstMacro
- Declares a static variable of the given type, with the specified initial value.
- itkGetMacro
- Defines an accessor method for the specified scalar data member. The
convention is for data members to have a prefix of
m_. - itkSetMacro
- Defines a mutator method for the specified scalar data member, of
the supplied type. This will automatically set the
Modifiedflag, so the filter stage will be executed on the nextUpdate(). - itkBooleanMacro
- Defines a pair of
OnFlagandOffFlagmethods for a boolean variablem_Flag. - itkGetObjectMacro, itkSetObjectMacro
- Defines an accessor and mutator for an ITK object. The Get form returns a smart pointer to the object.
Much more useful information can be learned from browsing the source in
Code/Common/itkMacro.h and for the itk::Object and
itk::LightObject classes.
Composite filters¶
In general, most ITK/OTB filters implement one particular algorithm,
whether it be image filtering, an information metric, or a segmentation
algorithm. In the previous section, we saw how to write new filters from
scratch. However, it is often very useful to be able to make a new
filter by combining two or more existing filters, which can then be used
as a building block in a complex pipeline. This approach follows the
Composite pattern, whereby the composite
filter itself behaves just as a regular filter, providing its own
(potentially higher level) interface and using other filters (whose
detail is hidden to users of the class) for the implementation. This
composite structure is shown in Figure [fig:CompositeFilterStages],
where the various Stage-n filters are combined into one by the
Composite filter. The Source and Sink filters only see the
interface published by the Composite. Using the Composite pattern, a
composite filter can encapsulate a pipeline of arbitrary complexity.
These can in turn be nested inside other pipelines.
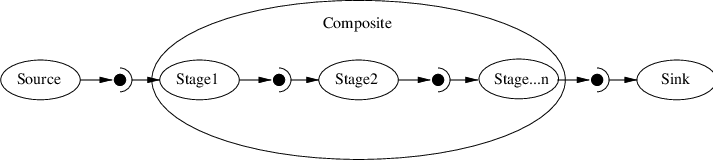
Fig. 34 A Composite filter encapsulates a number of other filters.
There are a few considerations to take into account when implementing a composite filter. All the usual requirements for filters apply (as discussed above), but the following guidelines should be considered:
- The template arguments it takes must be sufficient to instantiate all
of the component filters. Each component filter needs a type supplied
by either the implementor or the enclosing class. For example, an
ImageToImageFilternormally takes an input and output image type (which may be the same). But if the output of the composite filter is a classified image, we need to either decide on the output type inside the composite filter, or restrict the choices of the user when she/he instantiates the filter. - The types of the component filters should be declared in the header,
preferably with
protectedvisibility. This is because the internal structure normally should not be visible to users of the class, but should be to descendent classes that may need to modify or customize the behavior. - The component filters should be private data members of the composite
class, as in
FilterType::Pointer. - The default constructor should build the pipeline by creating the stages and connect them together, along with any default parameter settings, as appropriate.
- The input and output of the composite filter need to be grafted on to the head and tail (respectively) of the component filters.
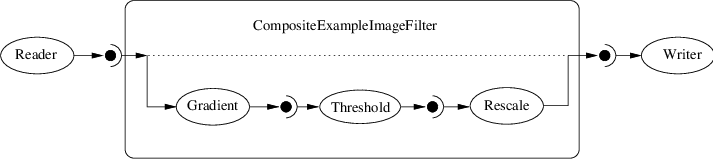
Fig. 35 Example of a typical composite filter. Note that the output of the last filter in the internal pipeline must be grafted into the output of the composite filter.
See example CompositeFilterExample.cxx